We are returning to Embedded World in 2024 (EW24) and will be showing off the things we’ve been working on at Golioth since last year. We’re also living a little closer to the edge and bringing some experiments and unreleased items to showcase on the floor. Demo gods, be kind!
We’ll be at the Zephyr booth, helping to showcase one of our favorite Real Time Operating Systems and Ecosystems (though not the only one we support!). Golioth generally only targets one part in our standard hardware setup, but we continuously verify a bunch of hardware on our Firmware SDK. This means that you can be certain that every new feature added to the Golioth Cloud and SDK is fully tested throughout our supported hardware. The great thing about Zephyr is that the underlying hardware works very similarly to all of our CVBs, because of the work from the silicon vendors that participate in the open source project. We’re excited because 2024 saw even more silicon vendors joining the fray!
Golioth Demos
Being part of a large project like Zephyr, we share time at the booth Kiosks. We’ll be at the Zephyr Booth (4-170) at the following times:
- Tuesday, April 9th from 1500 to 1800
- Wednesday, April 10th from 1200 to 1500
- Thursday, April 11th from 0900 to 1130
All times CEST, which is GMT + 1
Hardware we’ll have on hand
- Modbus Vibration monitor – This is our newest Reference Design that captures vibration and temperature data from a sensor normally used in industrial environments for large motors. The hardware in the Reference Design talks over RS-485 to the remote sensor and queries all of the available registers and publishes them to the Golioth cloud for processing and viewing.
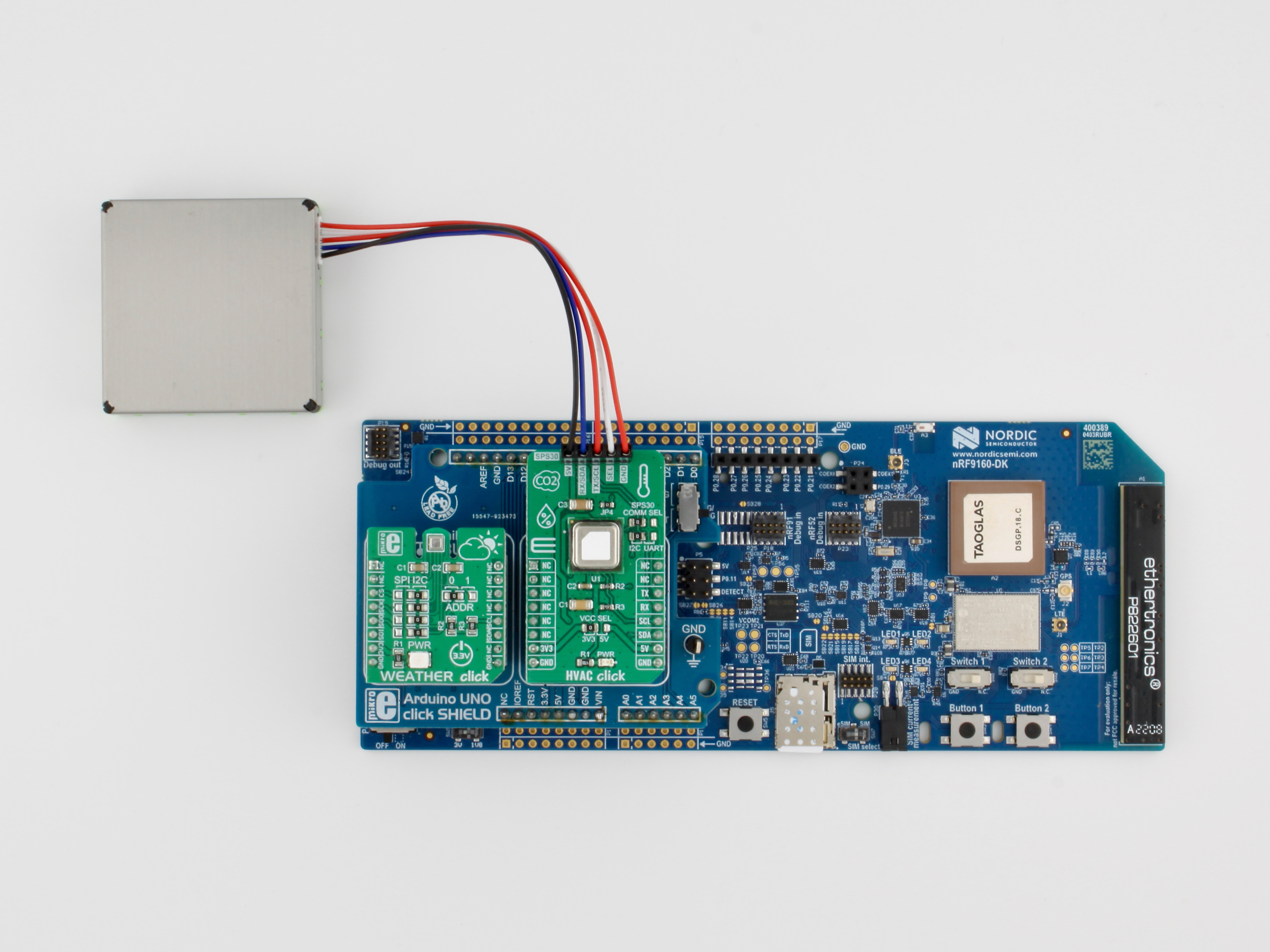
- Air Quality Monitor – It’s always interesting to see the trend lines of air quality metrics throughout the day. There are a lot of people that filter in and through the Nuremberg convention center, so we can track things like CO2 concentration just from the elevated number of bodies. The particulate counter is unlikely to go up a lot, but if there’s something like a cotton candy booth nearby, it could potentially have particulates flying through the air. I’ll be sure to go and investigate and clean up that particular air quality problem if the need arises.
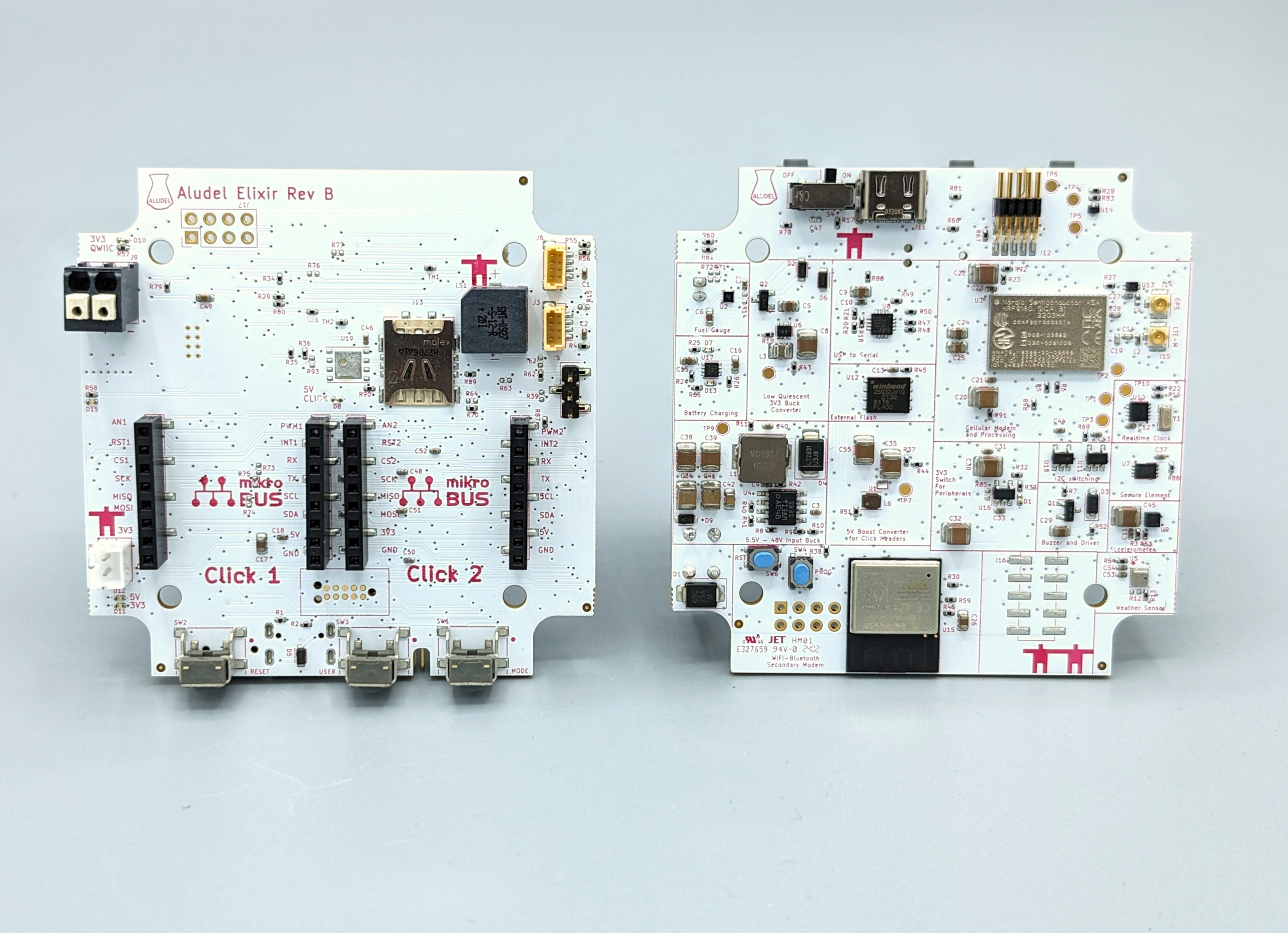
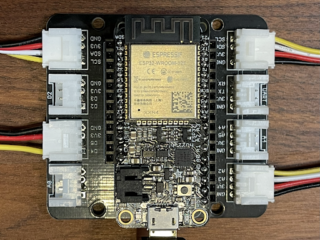
- Aludel Elixir – Powering our newer reference designs is the Aludel Elixir. This is an evolution of our previous designs (the Aludel Mini) that stitched together outside development boards that we loved like the Circuit Dojo nRF9160 Feather and the Sparkfun ThingPlus nRF9160. We pulled many of those components onto a bespoke PCB, and also added other components that can enhance any reference design. It all comes together in a custom milled case that enables maximum flexibility.
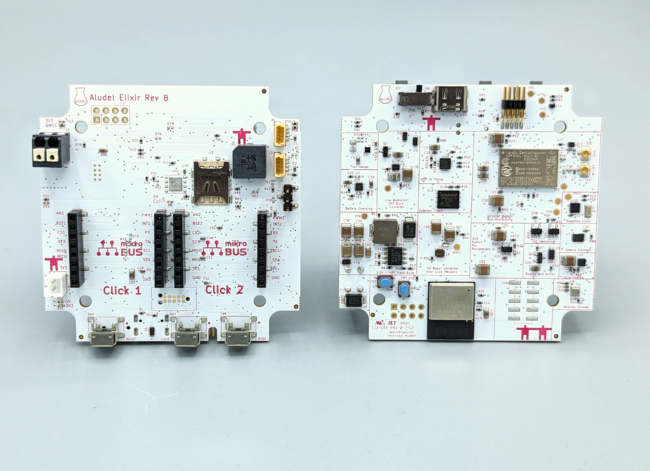
Aludel Elixir Rev B
Are you interested in your very own Aludel? Shoot me a note to discuss at Embedded World or fill out this form
Partner Demos:
AL2LOG at the AL2TECH booth (3A-335)

A render of the AL2LOG Unit
Our design partner AL2TECH based out of Italy is bringing an exciting new logging project based on the nRF9160 and an STM32 coprocessor. This is meant to target industrial applications that require a flexible way to capture data in a harsh environment.
The AL2LOG is a compact industrial logger with different sensor and actuator interfaces. This is based upon AL2TECH’s broad experience serving their clients in the energy meter/remote sensor monitoring industries.
The AL2LOG PCB (rev 1.0)
Some high level features include Cellular and GPS connectivity (nRF9160), as well as external module comms using USB-C, RS-485, and CAN. There is an Ultra Low Power acquisition and logging sub system (STM32) with a true 14 bit ADC. Industrial inputs including Digital Input, Dry Contact, Pulse Counter, 0-10V Voltage Analog Input, and 4-20mA Current Loop Input. There are outputs like Open Drain Output, and programmable supplies for devices downrange of the logger. The device can also switch external 220V via a relay. For powering the device you can use a 12-24V rail, or depend on the large D-Size High Power LTC Cells.
The device communicates back to Golioth using Zephyr/NCS and can be remotely updated using Golioth’s OTA service. Data routed from the field back to the cloud is accessible via the Golioth REST API.
BT Mesh demo from partner Ambient Sensors at the Zephyr booth (4-170)

BLE Mesh Demo from Ambient Sensors communicating through Golioth, on display at Embedded World
This demo shows Golioth controlling an LTE/BLE bridge (Thingy91) that communicates to a BLE Mesh composed of a series of lights that are running the Light Lightness Controller (the LC Server) model. Eight instances of the BBC micro:bit represent lights in this demo. The boards run BLE Mesh firmware on Nordic Semiconductor’s nRF52833, which could easily be controlling an LED driver instead of the demo LEDs.
The BLE SIG standard LC server code is running on each microbit, and is communicating with the Thingy91’s nRF52840, which communicates on the mesh as an LC client, Generic OnOff Client, and Light Lightness client. Using Golioth, the demo remotely sends a command to turn the LC server on, and lights will then slowly dim over time (as is the functionality of the LC server). Normally lights dim after several hours, but for the purpose of the demo, we set that value to several seconds. Delay values may also be set via Golioth, showing how these settings can be tuned remotely if desired. Additionally, we have created commands to allow the Golioth user to turn on the lights, while turning off the LC Server (to prevent it from dimming the lights), and to set the lightness value to any desired value.
Golioth connectivity demo at the NXP FRDM Lab

Find Golioth at the FRDM Lab at EW24
NXP is another vendor that has great support in Zephyr. We’ll be showcasing Golioth’s solution on NXP boards at their FRDM Lab in the Messepark classroom (the main open area when you walk into the conference). You can also see all of NXPs new solutions at their main booth in the presentation hall, booth 4A-222.
Even more Golioth!
What’s that? You haven’t seen enough of us yet? You’d love to hear more on-site at Embedded World? Well let’s telegraph every place we’ll be! In addition to our time showcasing Golioth at the Zephyr booth, we’ll also be giving a couple of talks at the Zephyr stage (next to the Zephyr booth):
- April 9th at 1400: “Building end-to-end Zephyr demos on IoT hardware”
- April 10th at 1530: “Multi MCU OTA updates with Golioth and Simple Management Protocol”
- April 11th at 1200: “Local toolchains, no more! Using GitHub Codespaces for training people on Zephyr throughout the world”
In the evenings (if we’re still standing), we plan to attend these open events and socialize with others in the industry:
- IoT Stars – This is a short speaker event, as well as a networking session. We’ll have some of our portable demos with us.
- PCBarts meetup – This is a more social event hosted by a local consulting and manufacturing company. Last year this was a wonderful group of engineers showing off their projects–personal and professional–after a long day at the tradeshow.
We really hope to see you at the conference! If you’d like to talk about Golioth and how we can work together, please fill out this form!