Microservices for Microcontrollers: Composable Software Architecture for Embedded Devices
Embedded systems, like any software system, benefits from modularizing software components, especially as they approach production. In this talk at the Embedded Open Source Summit 2024, Golioth Firmware Lead Sam Friedman talks about how to create “microservices” for microcontrollers. He maps a popular web concept onto existing software characteristics in Zephyr and shows how a real-world example can benefit from truly modular software.
Mapping a web concept to the microcontroller realm
As Sam points out early in this talk, it’s not really about microservices, because that’s a web concept. A microservice on the web is a piece of software, normally deployed onto cloud infrastructure, that can stand alone. It has defined inputs and outputs (APIs) and can operate independent of any other microservice. This helps for scalability and testing, but is a general trend in web software and deploying applications.
Microcontrollers are smaller and traditionally operate more like a “monolith” (another web term) because everything is interconnected. But there are concepts like Inter-Process Communication (IPC), which allows constrained devices to have similar ideas. IPC is a computer science idea that helps to optimize communication inside of operating systems. As it so happens, Zephyr is a (real time) operating system. Let’s look at what these are in practice.
How firmware developers can benefit
Sam describes how the concepts of Tasks, IPC, and Event Tasks are defined and might be used. But it is the Zephyr analogs that highlights familiar features, like the relatively new ZBus methodology. If a user adds a listener on the ZBus, they can listen (subscribe) for a particular value (topic) on the bus and take action based off of it. This helps to make the overall system more modular, because the addition or removal of a feature is not deeply integrated between elements of the system. Instead, the new piece of code is reacting to data put on the bus, which reduces interdependency and improves test areas.
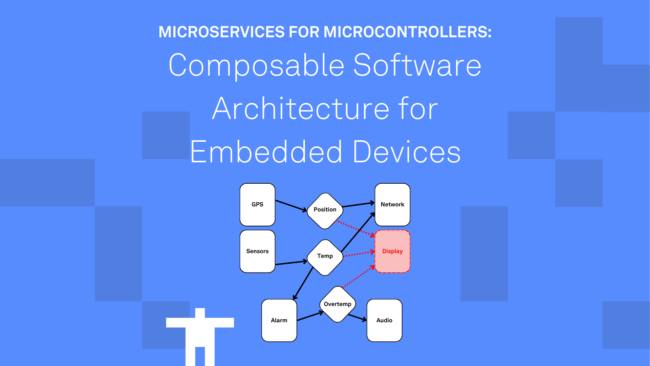
Real-World Example
Sam drives home his point by talking about a Golioth Reference Design like the Cold Chain Asset Tracker and how we can add capabilities like an onboard alarm when we hit a temperature threshold. Previously, this would have required refactoring to also send data from the sensor process to a new module that containes the alarm code. But with something like ZBus, the alarm can simply listen for a topic on ZBus and when the temperature module publishes to that topic, all relevant parties are updated.
This works in the opposite direction as well. Code written with this in mind would not break any future builds if a hardware cost-down removed an element like a front panel display. Instead, the user chooses not to build in that portion of the code (memory savings, yay!) and other parts of the code are not negatively impacted.
Bringing together the Cloud and Embedded Developers
Sam’s talk showcases what Golioth does well: match up the capabilities of the Cloud with the capabilities of an embedded system. Often many of the key ideas from computer science are more onerous to implement on a constrained system like a microcontroller, but Zephyr’s growing software toolbox makes it easier than ever to build a modular, testable system. Check out Sam’s talk above and his slides below for more context into how to build such a system.








{kind=link}
Start the discussion at forum.golioth.io