Today we’re announcing a new feature on the Golioth Console and on our Device SDKs that enables Remote Procedure Calls (RPCs) for all users on the platform. From the cloud, you can initiate a function on your constrained device in the field, ensure the device received and executed the command, and receive a response from the device back to the Cloud.
What is a Remote Procedure Call (RPC)?
A Remote Procedure Call allows you to call a function on a remote computing device and optionally receive a result. An easy way to think about it is you’re calling a function, like you would in any other program…you’re just doing it from another computer. In this case, you’re triggering actions from the Golioth Cloud.
RPC from the Golioth Cloud (Console)
Each device in your project has a page where you can view details about things like LightDB State, LightDB Stream, Settings, and now RPC. Our Console includes an interface to directly send RPCs to the remote device. The URL will look something like:
https://console.golioth.io/devices/<YOUR_DEVICE_ID>/management/rpc
In all of our examples, we are sending an RPC to single devices. However, they can also be triggered from the REST API. As a reminder, any function you see on the Golioth Console is available on the REST API.
One critical function of RPCs is a confirmation that the remote function has actually run. The device firmware needs to send back a success message that the function has completed, and optionally a returned value. When there is a problem connecting with your device and the RPC does not complete successfully, you will see a screen that looks like this:
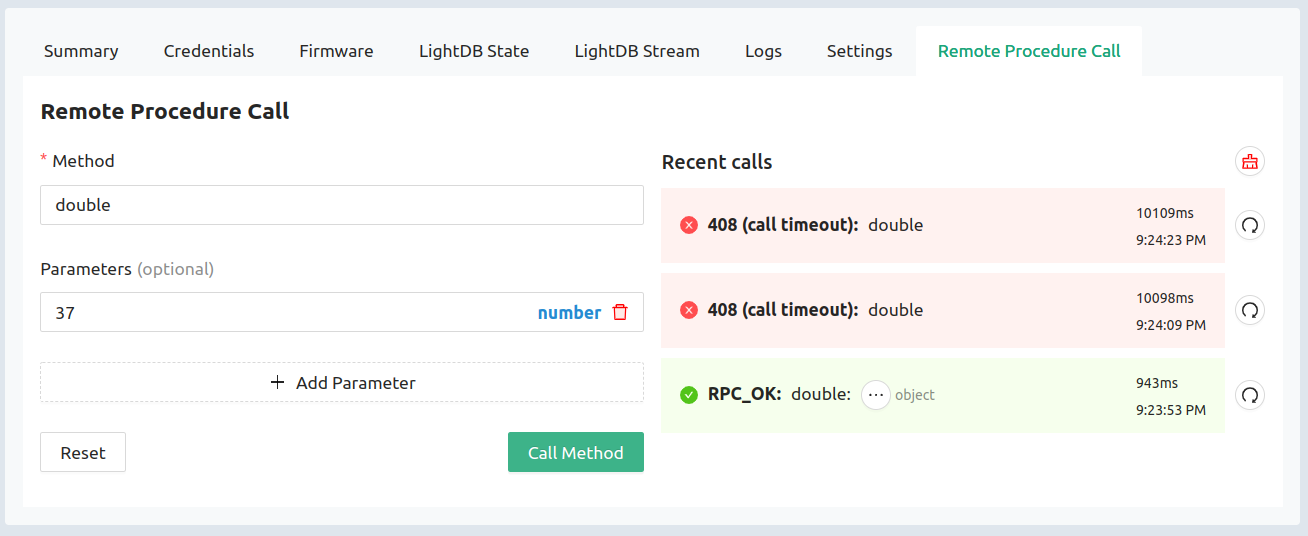
Also note that round trip time is measured for all RPCs, including successful ones. Transit times will depend upon your connectivity medium, in addition to the processing time of the function on the remote device.
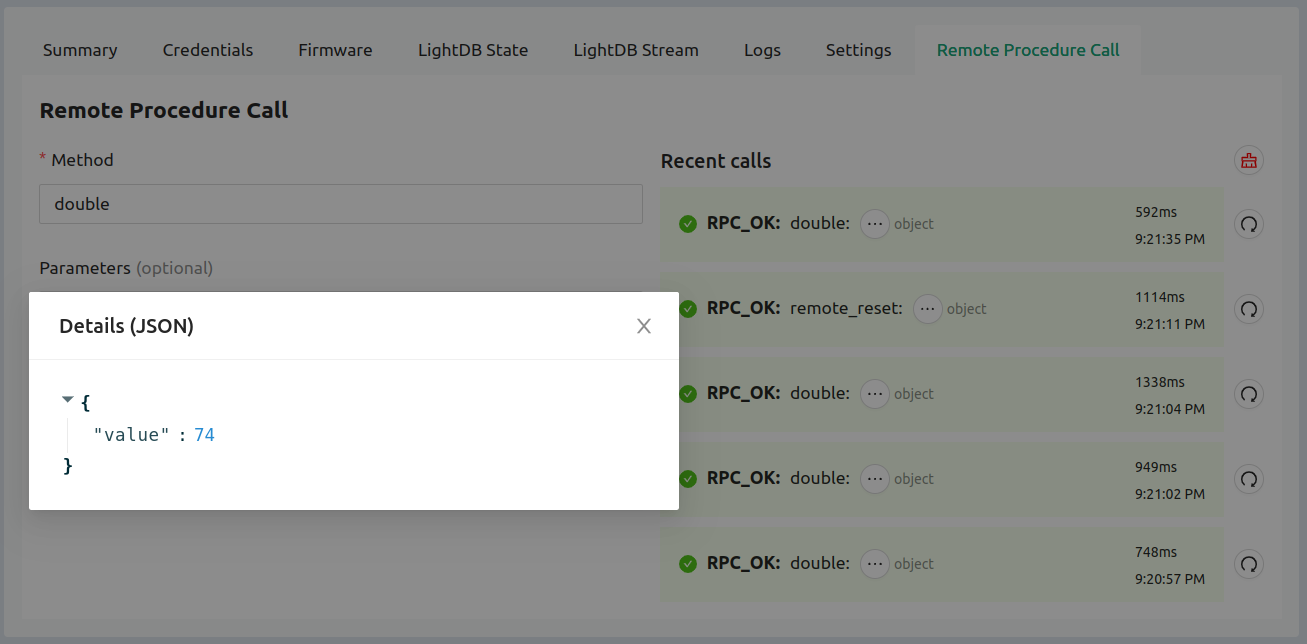
When an RPC successfully completes, you can click the button with 3 dots to receive the returned value. In the example and in the video, we were using a method called double that takes an integer input, multiplies it by two, and then returns the value to the Cloud. Below, you can see the result when we sent “double” method with a parameter of “37”.
RPC from the Device SDK perspective
Any new feature on Golioth has Device SDK support, in addition to the new APIs and UIs on our Web Console. Earlier this week, Nick wrote about how we test hardware and firmware at Golioth, especially when a new feature is released across the platform. Now that we support 3 SDKs (Zephyr, NCS, ESP-IDF), the testing area has increased.
In the video, the focus is on ESP-IDF, which has a simple way to set up and respond to new RPCs. First, we register the new method, so we’ll recognize the command coming from the Golioth Cloud:
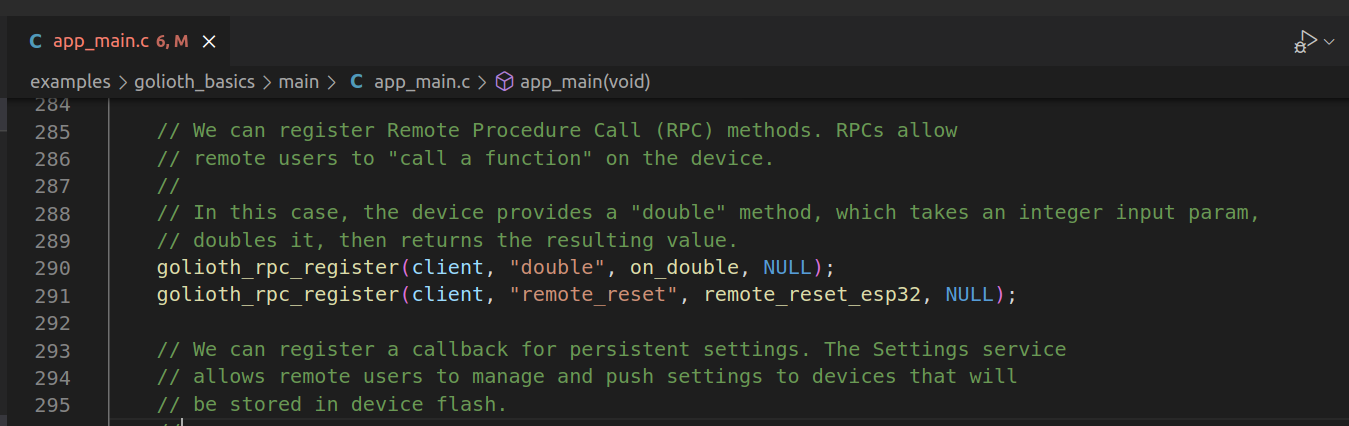
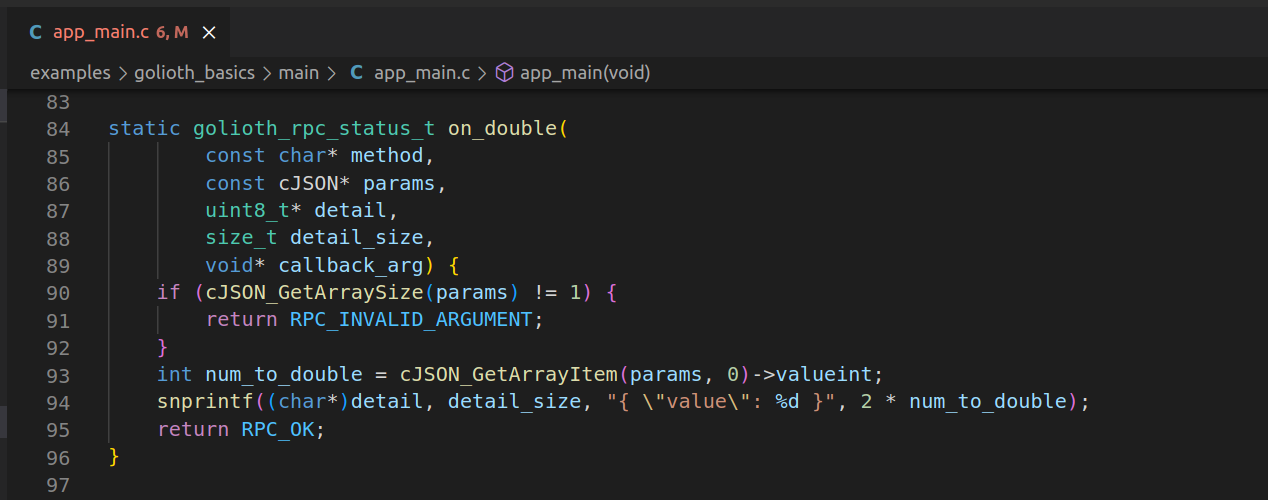
The function that we tie to that newly registered RPC needs to return the RPC_OK variable for the Cloud to be alerted that the function has processed properly.
If you have satisfied these requirements in the ESP-IDF SDK and copied the format, you can customize logic to do whatever task you’d like on the remote device. Let’s look at some examples.
Use cases for an RPC
The double() example is a simple showcase of the minimum requirements to create an RPC in the ESP-IDF SDK. We send a command and a value, we return a modified value.
The remote_reset command we created and showcased in the video is more like a critical function you would want to add to your project. When you want to trigger a remote function like a reset, you want to ensure that the command was properly received, that the function executed, and then that there was output data that validated the reset has happened. In the final point, that includes inferring that the device has restarted from the log messages also being sent back to the Golioth Console. Put all together, it’s a reliable way to tell the device has been reset.
Other use cases could be as simple as sending arbitrary text to a display. You would still want to know the text has been received and properly sent to the physical display. Or perhaps you have a valve and you want to be able to send an arbitrary value to the valve, but you also want to take a reading on an encoder that measures the distance the valve has moved.
Many of these functions could also be achieved with LightDB State (which the RPC service is built upon), but the context for creating an RPC is more targeted at situations like the examples above.
What will you build?
RPCs are another way for you to communicate with your constrained IoT devices from the Golioth Cloud and to get useful information back from your devices. You can start testing out this feature today.
For more questions or assistance, check out our Forums, our Discord, or drop us a note at [email protected].

No comments yet! Start the discussion at forum.golioth.io