Thread (and its common implementation known as OpenThread) is a networking technology that is quickly gaining adoption due to the forthcoming Matter standard. Thread has been around for many years, but as it grows, it becomes more accessible using off-the-shelf firmware and hardware. So it’s accessible, but maybe not all that straightforward. This post will help with that.
As we have more customers talking to us about using Golioth as a management layer for both Matter solutions and for standalone industrial Thread networks, we thought we should expand our tools to better fit the needs of engineers designing new systems.
In this article and associated examples, we will show you how to set up a network at home using common components. We’ll build a custom device that is communicating back over that network utilizing features of Golioth that extend the networking layer: over-the-air firmware updates, time series data tracking, command/control structures, and instant logging.
Parts of this Thread Guide
In the past, we have written about the basics of getting a Thread demo up and running, and shown it working on video. Today we build upon that work and showcase a new set of resources so you can build your own Thread network with custom devices.
- YouTube video – A walkthrough of the setup steps and troubleshooting steps with a newly provisioned Thread network.
- A tutorial site – Follow along with a simplified set of directions for replicating what we have built. We think is the shortest path towards getting a working Thread network on your desk or bench.
- Code repository – Start from working code on the node devices to see how you can customize code and have your sensor data streaming back to Golioth quickly.
- This blog post
Getting Started
The majority of the step-by-step instructions are contained in the tutorial site for Golioth and OpenThread. If you’re interested in immediately replicating and then extending our setup, head over to the tutorial site to learn more.
Let’s take a higher level look at the OpenThread Border Router (OTBR), OpenThread nodes, and Golioth device management layer that make up this Thread network example.
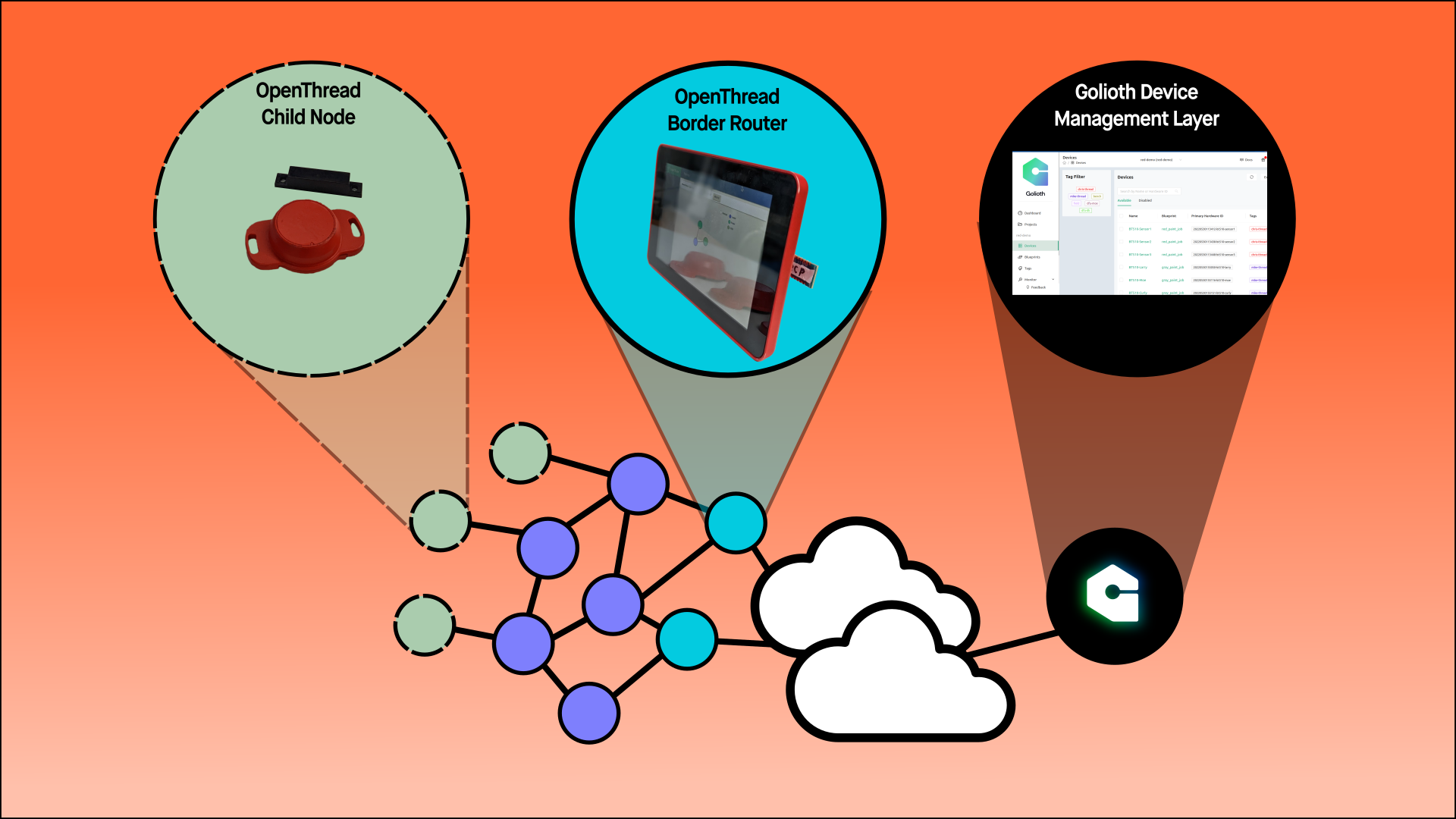
OpenThread Border Router (OTBR)
This is the key part in a Thread network, as it allows any arbitrary number of nodes that are communicating with one another (meshing) to then reach the outside internet. Each Thread device has an IPv6 address, which is great: That means a node that is meshing with 30 other nodes and connected to the internet (through an OTBR) is directly addressable from the internet. That’s an important piece. We might expect a higher power WiFi based device to have an IP address (assigned from a router), but probably not a low power sensor. The OTBR does a lot of the routing of information and translation of packets coming from node devices.
We build a DIY version of the OTBR because there aren’t many commercially available (yet). We use a Raspberry Pi and an nRF52840 Dongle to create a pipeline out to the wider internet.
OpenThread Nodes
In our first video/blog about Thread, we had nodes talking to the internet through an OTBR. However, the nodes only blinked and sent back logging messages and we didn’t give detailed instructions on how to build them. In the tutorial site and the video, we show how we can execute arbitrary code to do higher level functions, like data logging. We use the Laird Connectivity BT510, which is a sensor node built with the Nordic Semiconductor nRF52840. It also has a range of sensors built in and is contained in a waterproof case. We think it’s a great platform for building a small, reliable Thread network and we used it in our Red Demo that we showcased at the 2022 Zephyr Developer Summit and Embedded World.
The BT510 is a board already supported in Zephyr, which means we can very easily compile firmware for it and access all of the sensor drivers that are built into Zephyr, no custom out-of-tree code required. We use the OpenThread networking stack that is native to Zephyr, and the Golioth SDK, which allows each node to be pre-configured to talk to the Golioth servers. We then enable things like LightDB Stream to regularly send back sensor data from the device through the Thread network.
Golioth Device Management Layer
The Golioth Device Management Layer/Platform is already ready for you. If you don’t have an account, you can sign up on the Golioth Console, which will guide you through creating your first device on the platform; you can use the credentials for that digital version of a device to control your first Thread node.
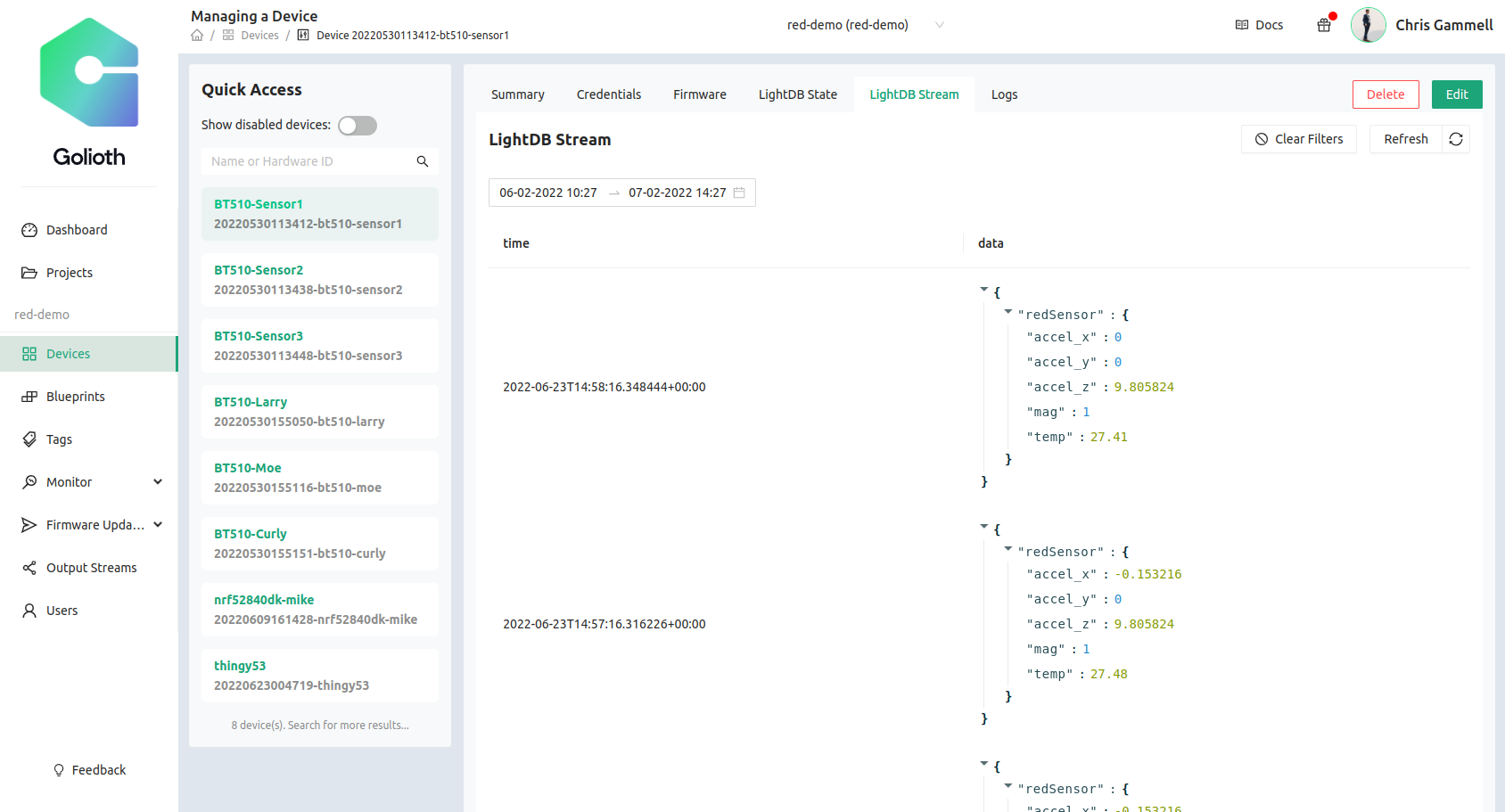
Once your Thread device is connected, you’ll be able to see how often the device is connecting, view the latest data and logs being sent back from the device, and check which firmware versions are on each device. Any data sent to the Golioth platform from a Thread node can be aggregated into an external visualization platform, or wholesale exported to 3rd party services (AWS, Azure, GCP) using Output Streams.
What will you build?
We are sharing the know-how to build a Thread network. Following this guide enables all of your devices on the Thread network to communicate back to the wider internet. As a hardware engineer, I don’t really want to mess about with the network layer, I just want something that works. Instead, I’d rather focus on the end application and building end devices (nodes) that are useful to customers and users.
With Golioth, Zephyr, OpenThread, and some off-the-shelf hardware, you can get started quickly and you can start to connect custom devices with a powerful interface to the internet. What will you build? Please let us know on our Discord, Forum, or on Twitter.
