The Raspberry Pi Pico2 W is the one with a microcontroller and Wi-Fi. When most people think of Raspberry Pi as a single-board computer running Linux, this model is a microcontroller with a slew of impressive peripherals. While the original Pico (based on the RP2040) has had Zephyr support for a long time, the Pico2 is build on an RP2350 and the W variant delivers Wi-Fi support which lands in Zephyr with the upcoming release of v4.3.0.
We love taking new IoT hardware for a spin on Golioth and couldn’t resist adding the Pico2 W to our list of “works with Golioth” boards. In fact, we like this one so much we’re planning to add it to our hardware-in-the-loop (HIL) rigs to test on the hardware with each PR and push to main.
State of Pico2 W Support in Zephyr
The RP2350 has had support in Zephyr for some time now, but the option of using the Wi-Fi–available thanks to the Infineon chip on the Pico2 W board–is brand new. For now, you’ll need to build on v4.3.0-rc2 to use the Wi-Fi.
Also of note is that the last stable release of OpenOCD (0.12.0 release January 2023) does not support the RP2350. Since this is the version included in the Zephyr skd-ng, you’ll need to build OpenOCD from source (or find a newer build) in order to flash/debug the Pico2 W.
I found that building OpenOCD was pretty straight-forward. Follow the compilation instructions on the README by running the following commands:
./bootstrap ./configure make sudo make install
I didn’t actually run the install command, instead pointing Zephyr’s west tool to the binary and the scripts directory. More on that later.
While there is a VScode plugin for working with the Pico2 in Zephyr, I have not tried it and am unable to report as to the state of OpenOCD with that approach.
Preparing Golioth for the Pico2 W Build
The latest release of the Golioth Firmware SDK (v0.21.1) supports Zephyr v4.2.1. Find the west.yml file and update the Zephyr version to v4.3.0-rc2, then run an update to pull in the new version:
west update
That Infineon module has some secret sauce that makes the Wi-Fi work. We need to pull in the binary blobs to take advantage of that. We can do this the easy way or the hard way. While the hard way is cooler, let’s start with the easy way:
west blobs fetch hal_infineon
That will take a few minutes as all available binary blobs from Infineon are downloaded. However, when bringing this board up I also discovered that the fetch command supports regex! Using this we can filter just for the blobs we need:
west blobs fetch hal_infineon --allow-regex='img/whd/resources/(firmware/COMPONENT_43439|clm/COMPONENT_43439/COMPONENT_MURATA-1YN)/*'
Building and Running Golioth Hello for the Pico2 W
As with most new things, I want to run hello world as a first test. With much trial and error I boiled the necessary configuration down as follows:
CONFIG_NETWORKING=y CONFIG_TEST_RANDOM_GENERATOR=y CONFIG_NET_DHCPV4=y CONFIG_NET_IPV4=y CONFIG_NET_IPV6=n CONFIG_WIFI=y CONFIG_WIFI_LOG_LEVEL_ERR=y CONFIG_NET_L2_WIFI_SHELL=y CONFIG_GOLIOTH_SAMPLE_WIFI=y
Enabling networking, DHCP, and IPv4 is pretty boilerplate for Zephyr. What’s not is turning on the test random number generator. While the RP2340 has a TRNG hardware peripheral (a great improvement over the RP2040 which did not), it is not yet supported in Zephyr.
Turning on Wi-Fi is expected. The Golioth sample Wi-Fi handles auto connection for the Golioth sample applications. You may also just use the Wi-Fi shell commands to set your SSID/PSK and connect to an AP if you prefer.
For the Golioth samples, the last piece of the puzzle is to add a storage partition. The vast majority of Zephyr boards I’ve worked with enable partitions by default in the board definition but the Pico2 is an outlier in a couple of ways I’ll discuss later. For now, add a board overlay to enable a storage partition.
/* Partitioning for the RP2350A-M33 board using 4M flash. */ #include <raspberrypi/partitions_4M_sysbuild.dtsi>
With this we can build and run the application:
west build -p -b rpi_pico2/rp2350a/m33/w examples/zephyr/hello west flash
Oh no, it didn’t work!
Can't find target/rp2350.cfg FATAL ERROR: command exited with status 1: /home/mike/zephyr-sdk-0.17.4/sysroots/x86_64-pokysdk-linux/usr/bin/openocd -s /home/mike/golioth-compile/golioth-firmware-sdk/zephyr/boards/raspberrypi/rpi_pico2/support -s /home/mike/zephyr-sdk-0.17.4/sysroots/x86_64-pokysdk-linux/usr/share/openocd/scripts -f /home/mike/golioth-compile/golioth-firmware-sdk/zephyr/boards/raspberrypi/rpi_pico2/support/openocd.cfg -c 'source [find interface/cmsis-dap.cfg]' -c 'source [find target/rp2350.cfg]' -c 'set_adapter_speed_if_not_set 5000' '-c init' '-c targets' -c 'reset init' -c 'flash write_image erase /home/mike/golioth-compile/golioth-firmware-sdk/modules/lib/golioth-firmware-sdk/build/zephyr/zephyr.hex' -c 'reset run' -c shutdown
As mentioned before, we are missing official support. Let’s build again and tell Zephyr where our custom OpenOCD is located:
west build -p -b rpi_pico2/rp2350a/m33/w examples/zephyr/hello -- -DOPENOCD=/home/mike/golioth-compile/openocd/src/openocd -DOPENOCD_DEFAULT_PATH=/home/mike/golioth-compile/openocd/tcl west flash
This time we’re in business. Now it’s just a matter of creating some Golioth credentials using the web console, opening up a serial terminal, and provisioning the device:
wifi cred add -k 1 -s your_ssid -p your_wifi_password settings set golioth/psk-id your-golioth-psk-id settings set golioth/psk your-golioth-psk kernel reboot
The three values for the Wi-Fi credentials are set using Zephyr’s built-in settings. The -k is encryption types, while -s and -p are SSID and PSK. From there, set your Golioth PSK-ID/PSK as normal and reboot the chip.
Sample Output
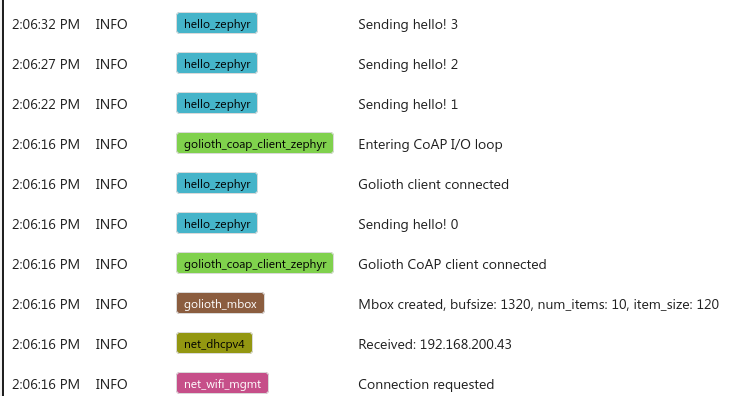
The entire process of provisioning and connecting to Golioth will look about like this:
[00:00:03.112,000] <inf> fs_nvs: 8 Sectors of 4096 bytes [00:00:03.112,000] <inf> fs_nvs: alloc wra: 0, fe8 [00:00:03.112,000] <inf> fs_nvs: data wra: 0, 0 *** Booting Zephyr OS build v4.3.0-rc1 *** *** Golioth Firmware SDK v0.21.1-24-g5d0365be5a81 *** [00:00:03.113,000] <wrn> net_sock_tls: No entropy device on the system, TLS communication is insecure! [00:00:03.113,000] <inf> golioth_settings_autoload: Initializing settings subsystem [00:00:03.113,000] <inf> golioth_settings_autoload: Loading settings [00:00:03.113,000] <dbg> hello_zephyr: main: start hello sample [00:00:03.113,000] <inf> golioth_samples: Bringing up network interface [00:00:03.113,000] <inf> golioth_samples: Waiting to obtain IP address [00:00:03.113,000] <inf> golioth_wifi: Connecting to stored WiFi network uart:~$ wifi cred add -k 1 -s golioth -p your-wifi-password uart:~$ settings set golioth/psk-id rpi-pico2w@iot_fleet Setting golioth/psk-id to rpi-pico2w@iot_fleet Setting golioth/psk-id saved as rpi-pico2w@iot_fleet uart:~$ settings set golioth/psk 840e6b5b64f23e0f2cd794051642c0aa Setting golioth/psk to 840e6b5b64f23e0f2cd794051642c0aa Setting golioth/psk saved as 840e6b5b64f23e0f2cd794051642c0aa uart:~$ kernel reboot [3067] WLAN MAC Address : 2C:CF:67:DF:09:D9 [3070] WLAN Firmware : wl0: Jun 5 2024 06:33:59 version 7.95.88 (cf1d613 CY) FWID 01-7b7cf51a [3079] WLAN CLM : API: 12.2 Data: 9.10.39 Compiler: 1.29.4 ClmImport: 1.36.3 Creation: 2024-04-16 21:20:55 [3088] WHD VERSION : 3.3.3.26653 [3091] : WIFI5-v3.3.3 [3093] : GCC 12.2 [3095] : 2025-04-14 03:18:50 +0000 [00:00:03.112,000] <inf> fs_nvs: 8 Sectors of 4096 bytes [00:00:03.112,000] <inf> fs_nvs: alloc wra: 0, fa0 [00:00:03.112,000] <inf> fs_nvs: data wra: 0, 13e *** Booting Zephyr OS build v4.3.0-rc1 *** *** Golioth Firmware SDK v0.21.1-24-g5d0365be5a81 *** [00:00:03.113,000] <wrn> net_sock_tls: No entropy device on the system, TLS communication is insecure! [00:00:03.113,000] <inf> golioth_settings_autoload: Initializing settings subsystem [00:00:03.113,000] <inf> golioth_settings_autoload: Loading settings [00:00:03.113,000] <dbg> hello_zephyr: main: start hello sample [00:00:03.113,000] <inf> golioth_samples: Bringing up network interface [00:00:03.113,000] <inf> golioth_samples: Waiting to obtain IP address [00:00:03.113,000] <inf> golioth_wifi: Connecting to stored WiFi network Connected [00:00:06.024,000] <inf> net_wifi_mgmt: Connection requested [00:00:06.612,000] <inf> net_dhcpv4: Received: 192.168.200.43 [00:00:06.613,000] <inf> golioth_mbox: Mbox created, bufsize: 1320, num_items: 10, item_size: 120 [00:00:06.839,000] <inf> golioth_coap_client_zephyr: Golioth CoAP client connected [00:00:06.839,000] <inf> hello_zephyr: Sending hello! 0 [00:00:06.839,000] <inf> hello_zephyr: Golioth client connected [00:00:06.839,000] <inf> golioth_coap_client_zephyr: Entering CoAP I/O loop [00:00:11.839,000] <inf> hello_zephyr: Sending hello! 1 [00:00:16.839,000] <inf> hello_zephyr: Sending hello! 2 [00:00:21.839,000] <inf> hello_zephyr: Sending hello! 3
And when we look at the device logs on the Golioth cloud we see our hello world messages coming through from the Pico2 W!
Zephyr Gotchas with the Pico2 W
There are a number of gotchas to following along with the post so far. Zephyr supports a number of runners for flashing this board, including the UF2 bootloader. However, I’m using a programmer because I don’t want to push a button (and replug USB) to flash the chip.
That’s okay, because Zephyr doesn’t have USB-CDC support for this board either. This means you can’t get logs from the USB port. I’m using the Raspberry Pi Debug Probe because it takes care of a number of these issues: directly program the chip, use the built-in UART to connect to the chip’s console, and I’m using a hack to power the Pico from the debug probe (do so at your own peril).
Edit: Thanks to Chris Wilson who pointed out that USB-CDC worked on the Pico and should also work on the Pico2 w. I went back and tried again and was able to get it working on the usb-cdc sample with a bit of devicetree work.
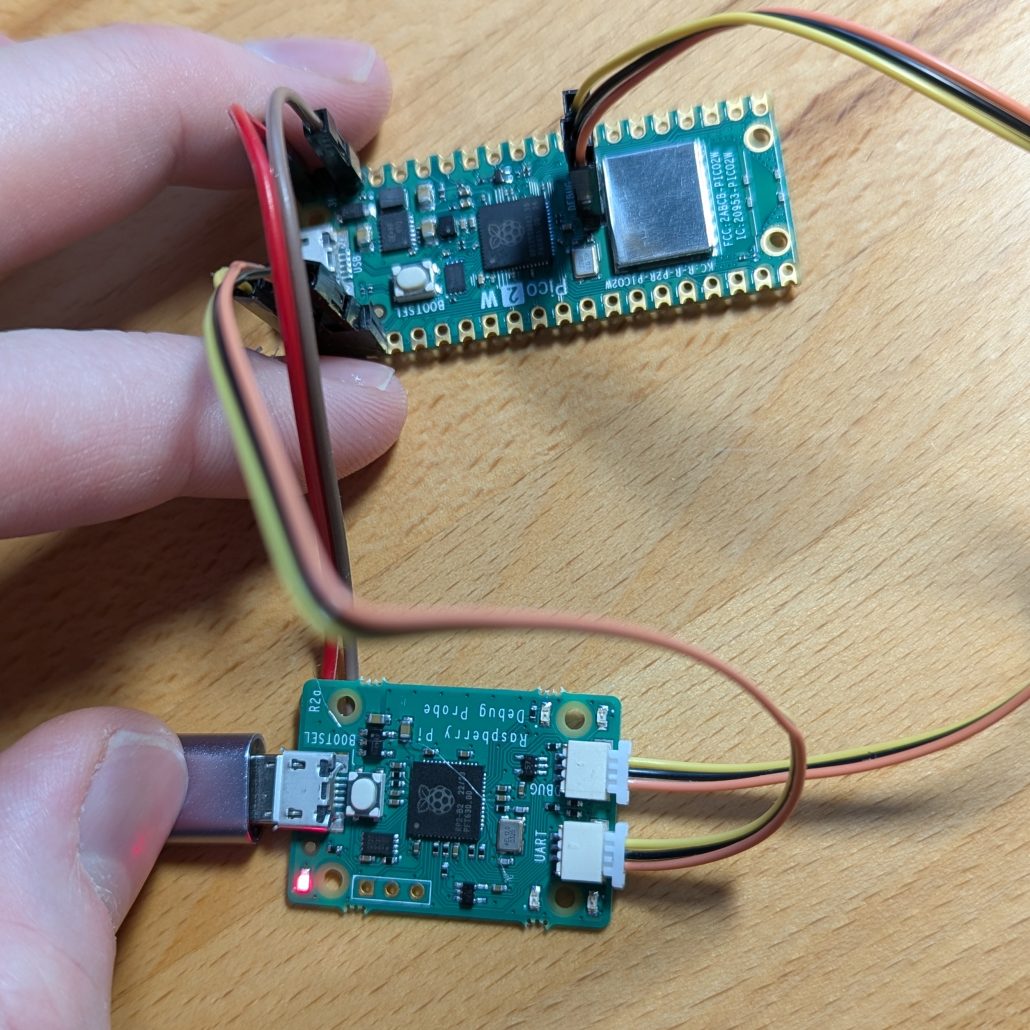
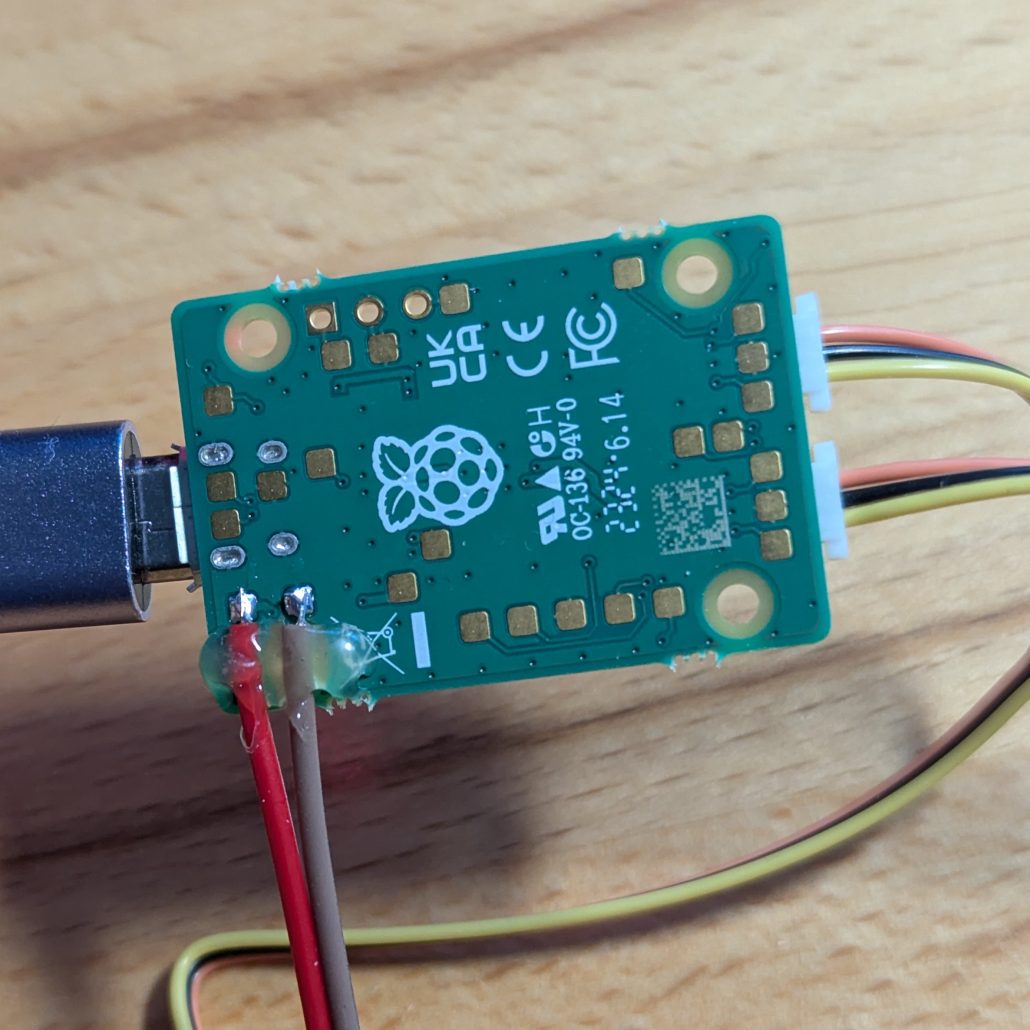
Using this arrangement, I only need to plug USB into the debug probe and I can flash, debug, and monitor serial output.
The final gotcha with this board is that the MCUboot support takes a much different approach than I’m used to. I mentioned above that the partition tables are not included in the build by default. Instead of simply using --sysbuild to indicate the build wants a bootloader, you must change the board name itself to use an additional qualifier: rpi_pico2/rp2350a/m33/w/mcuboot. This presents a minor annoyance when I added this to our GitHub CI, but otherwise it’s just a different approach from what I’m accustomed to and still works well.
Take Golioth for a Spin on your Pico2 W!
Official Golioth support for this board is coming soon. We can’t merge to main until Zephyr releases v4.3.0, expected this month. For now, check out my working branch and let us know how things go!

No comments yet! Start the discussion at forum.golioth.io