Hello from ZDS!
This week the Golioth team is at Zephyr Developer Summit. Previously we announced that we’ll be there and shared the talks we are presenting. We will post those shortly after the conference takes place. In the meantime, let’s recap how we got here in the first place and share a little bit more about what we’re showcasing.

Why Zephyr?
In short, because it helps our users. We are members of the Technical Steering Committee (TSC) and have been almost since the inception of the company. We built our first Device SDK on top of Zephyr because of the broad hardware support and high level integration of Golioth features into the Real Time Operating System (RTOS).
The assertion that “Zephyr helps our users” might be extra frustrating to beginners: Zephyr—and RTOSes more broadly—represents a tricky new set of skills that might be foreign to firmware or hardware engineers. For beginners coming from the hobby space, it can be an extra rude introduction into the world of command line compilation and large ecosystem. However, connecting to the internet is a difficult task, especially for custom hardware: we think that Zephyr represents a great first step towards managing those devices over time. We are committed to pushing for more user-friendly code and methods from the Zephyr foundation, and we will continue to publish best practices on our blog and our YouTube channel to help people get connected.
Showcase
One thing we’re excited about is showcasing how Golioth works to members of the community. We have been developing different “color coded” demos to make them a bit more memorable for folks that stop by our booth. Each of these demos feature a hardware (device) component and a dashboard component, in order to visualize the data that is on the Golioth Cloud.
This is the first time we have showcased the “Aludel”, which is our internal platform for prototyping ideas and switching out different development boards and plug-in sensors. We will post more about this in the future, including our talk on the subject.
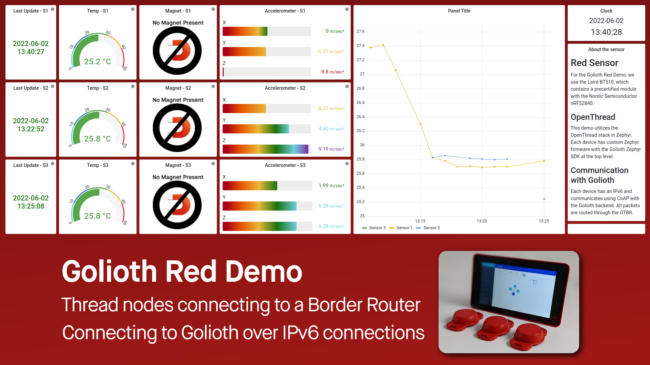
Red Demo
The Red Demo is our showcase of devices running OpenThread on Zephyr; this is part of our larger interest in Thread, which we see as a very interesting way to connect a large range of sensors to the internet securely. We have been excited to show how we can use low power devices like the Nordic nRF52840 to communicate directly with the Golioth Cloud.

The devices we are using in this case are off-the-shelf multi-sensor nodes from Laird called the BT510. This hardware has additional sensors on the board which we integrated with LightDB Stream to send time-series data back to Golioth. This was fast work, thanks to Laird’s Zephyr support, it was as simple as calling out the board when we compiled the demo firmware.
We then capture the data from these on the Red Demo Dashboard, showing both historical and live data for the sensors.
Green Demo
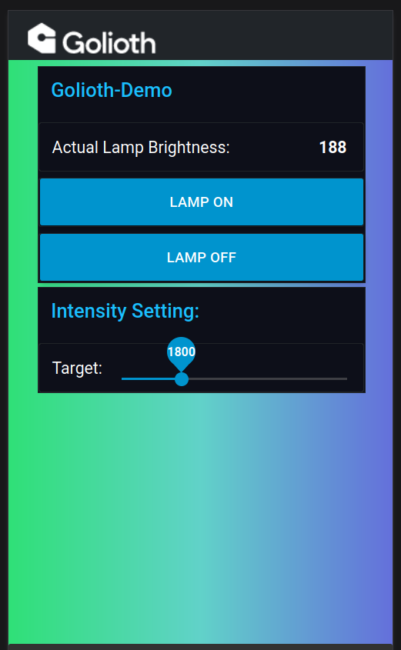
The Green Demo showcases LightDB State, our real-time database that can be used to control a wide range of devices in a deployment. On the device side, it uses the Aludel platform to measure a light sensor, as would happen in a greenhouse. There is also a secondary Zephyr-based device inside a lamp, representing a grow light that might be inside a grow house. The lamp is set up to “listen” to commands from another node, in this case the Aludel.

LightDB State is used to control elements like “update rate” to control regulate flow of information. It also lets us monitor critical device variables on an ongoing basis and set up logic on the web to take actions as a result. Command and control variables can be set from multiple places, including a custom mobile app, the Golioth Console, a visualization platform, a web page, or (as is the case here) even from another device!
Our Green Demo Dashboard (below) again showcases live and historical information, as well as the current status of the connected lamp.

As an added bonus, we control some of the logic on the back end from a Node-RED instance, including control logic. That takes the light intensity sensor output and calculates how bright the lamp should be. Because this is written in Node-RED, we can include an additional input from a mobile app to control the “target intensity”. In this way, people at the booth can adjust the lamp output if the exhibition space is brighter or darker. Plus…it looks cool!
Blue Demo
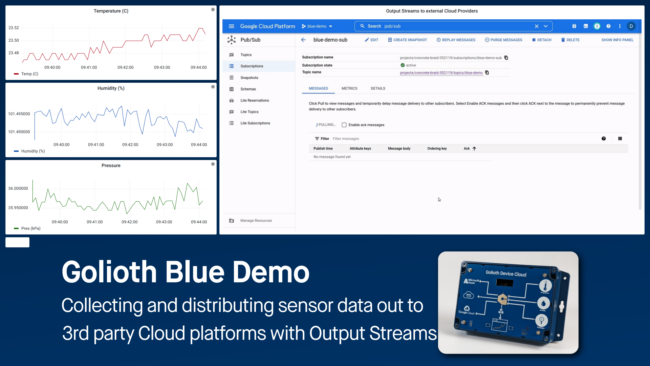
The Blue Demo helps to showcase how data migrates into and out of Golioth. Using Output Streams, you can export all cloud events to 3rd party providers like AWS, Azure, and Google Cloud. Buttons on the Blue faceplate switch the output being sent back to the cloud. The sensor readings being exported to all 3 clouds can be turned on or off by changing which variables are exported from the device.

On the device side, we capture a sensor using our Aludel platform. The sensor is a BME280 (in-tree sensor in Zephyr), going through a feather form-factor dev board, talking to the network over a WizNet W5500 Ethernet external chip to the network. The Blue Demo Dashboard showcases the live data, and of course the data is being exported simultaneously to the 3 cloud platforms in real-time.
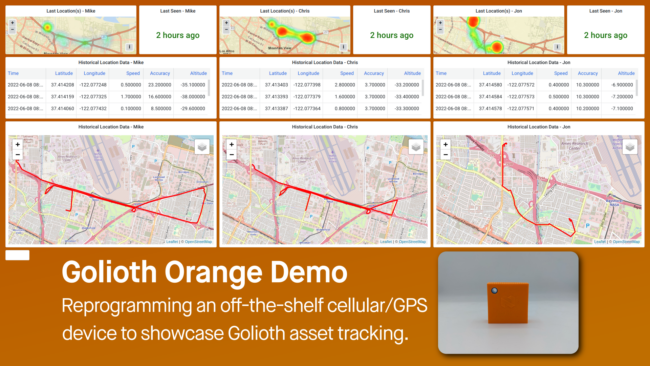
Orange Demo
Golioth is a “middleware” built on top of Zephyr RTOS, which means you can use it to implement new features on top of already-existing hardware. This demo uses the Nordic Semiconductor Thingy91 with custom firmware to send GPS data back over the cellular network to Golioth using LightDB Stream. This demo also has Golioth Logging and Device Firmware Update, which are easy to add to any project as an additional service for troubleshooting or in-field updates.

On the dashboard side, we wanted different ways to showcase this data, including “latest update”. Having access to the raw data is useful for anyone wanting to try asset tracking applications. We’re excited to be able to showcase this data as it dynamically flows into the Golioth Console and back out to the Grafana dashboard.
Future showcases
We’re excited to be showcasing our demos at the Zephyr Developer Summit, but these are moving targets! We will continue to update and pull in new feature for future events. We will be at Embedded World in two weeks (June 20-24th) and will have many of the same demos there.
