Golioth recently added the RAK5010 as a board that works “out of the box” with all of the Golioth Firmware SDK samples. This dev board offers a Nordic nRF52840 connected to a Quectel BG95 cellular modem–which is based on Qualcomm technology. This is quite a useful combination for a cell-connected sensor platform, GNSS/GPS asset tracker, Bluetooth gateway, and any number of other applications.
Honestly, a colossal number of boards work with Golioth thanks to Zephyr’s cross-vendor support. It’s just a matter of ensuring the board configuration is in place. Let’s dive into that today, to take a look at how we configured the RAK5010 for Zephyr and how to connect a programmer to flash the firmware.
Connecting a programmer to the RAK5010
The RAK5010 is programmed using JTAG over the ARM Single Wire Debug (SWD). There are a few things to remember with this configuration:
- GPIO signals are 1.8V, so you must use a programmer that supports that logic level
- The reset pin is not broken out to the headers, so software reset must be used
The SEGGER J-Link programmer is perfect for this, and already has runner support built into Zephyr.

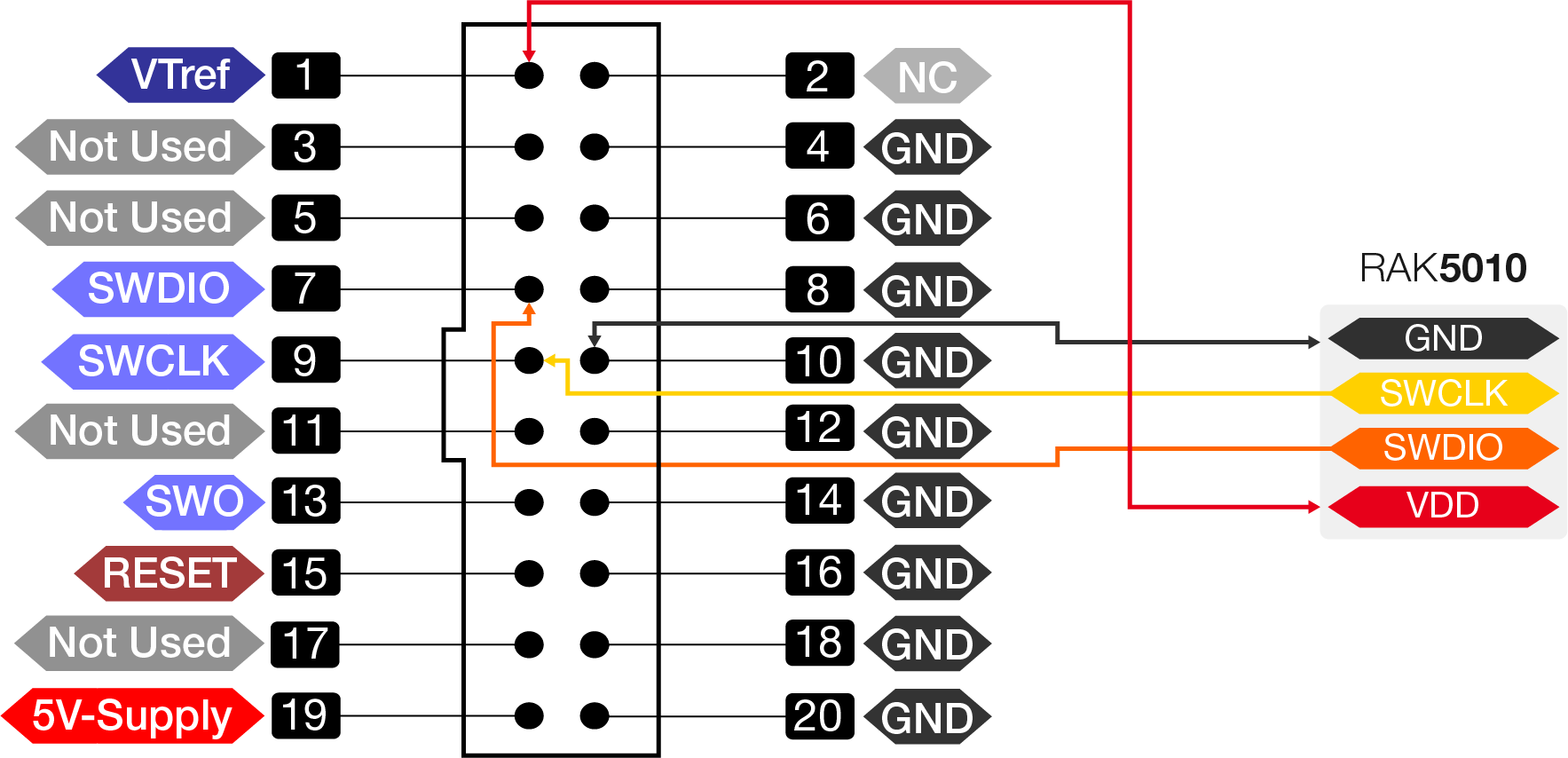
When I first started working with this board, used jumper cables to directly connect the pins on the RAK5010 to the pins inside the connector socket of the J-Link. The RAK5010 user guide has a connection diagram for this:
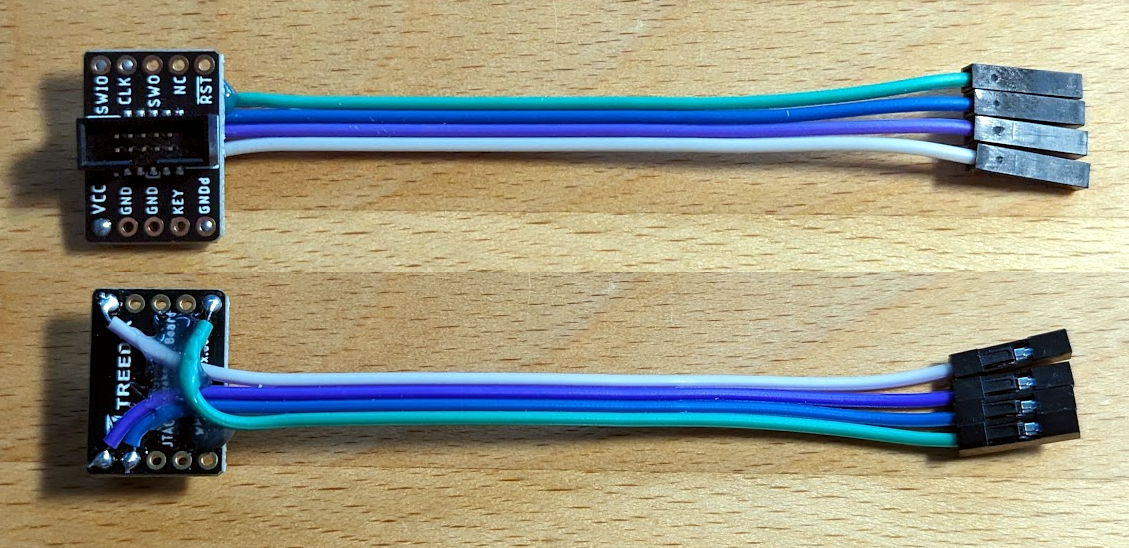
I use my J-Link for a lot of different boards, so this quickly became annoying to hook back up each time I returned to it. Instead I ordered an adapter board and soldered my own little dongle that interfaces with a standard 1.27mm IDC cable
I have also tested using a 1.8V JTAG programmer with this board. It will work, but I found for larger Zephyr programs I had to load the binary manually in the GDB console. Your mileage may vary.
Zephyr configuration for the RAK5010
Support for the RAKwireless RAK5010 is built into Zephyr. However, I found a few usability issues. These have already been accounted for in the board files for all of the Golioth’s Zephyr sample applications. Let’s walk through the details.
Use USB as a serial connection
If you want to use the USB port for serial output, the USB-CDC driver needs to be turned on and configured. This involves mapping the console in devicetree and enabling it in Kconfig:
/ {
chosen {
zephyr,console = &cdc_acm_uart0;
zephyr,shell-uart = &cdc_acm_uart0;
};
};
&zephyr_udc0 {
cdc_acm_uart0: cdc_acm_uart0 {
compatible = "zephyr,cdc-acm-uart";
};
};
# USB CONFIG_USB_DEVICE_STACK=y CONFIG_USB_DEVICE_PRODUCT="RAK5010 Zephyr" CONFIG_USB_DEVICE_PID=0x0004 CONFIG_USB_DEVICE_INITIALIZE_AT_BOOT=y CONFIG_UART_CONSOLE=y CONFIG_UART_LINE_CTRL=y CONFIG_LOG_BACKEND_RTT=n CONFIG_USB_CDC_ACM_LOG_LEVEL_OFF=y
Use the Zephyr modem driver
The Quectel BG95 works well with Zephyr’s new(ish) modem driver. The board is supported by the in-tree cellular-modem sample and I cribbed most of the configuration from there.
CONFIG_UART_ASYNC_API=y CONFIG_MODEM_CELLULAR_APN="internet" # Networking CONFIG_NETWORKING=y CONFIG_NET_NATIVE=y CONFIG_NET_L2_PPP=y CONFIG_NET_IPV4=y CONFIG_NET_UDP=y CONFIG_NET_SOCKETS=y CONFIG_NET_CONTEXT_RCVTIMEO=y # Modem driver CONFIG_MODEM=y CONFIG_MODEM_CELLULAR=y
The one quirk that I found, compared to other Zephyr networking, is that this board needed an explicit call to bring up the network interface. That’s now built-in to the Golioth common library, if you’re in need of help, check out the commit where it was added.
Build and flash for the RAK5010
Building and flashing is nearly the same for this board as any other. The one caveat is that if you don’t account for a lack of the reset pin, you’ll need to manually press the reset button (or power cycle) on the board for the binary to begin running. The –softreset flag shown below solves this for me. (This is the case for the default nrfjprog runner, I also tested the pyocd runner and found reset worked as expected).
west build -b rak5010_nrf52840 west flash --softreset
Other considerations
I had the chance to dig into the modem driver in a project that uses the RAK5010. It’s pretty incredible, and it looks like the chat script system will enable us to add any AT-command based modem to Zephyr with relatively little pain.
The chat script steps for the BG95 are in-tree. There is one step that always throws a timeout warning when first connecting. In my testing, this didn’t affect behavior (beyond delaying the connection for the few seconds for the timeout to occur).
As I write this post, v3.6.0 is the most recent Zephyr release. However, in a few weeks v3.7.0 will be released and this will upend board definitions. A new paradigm for defining boards has been adopted and it’s probably worth your time to get familiar with the new hardware model.

No comments yet! Start the discussion at forum.golioth.io